کنترل ارتعاشات سکوی پايه کششی تحت بارهای ديناميکی عنوان پایان نامه مقطع کارشناسی ارشد رشته مهندسی دریا دانشکده مهندسی مکانیک دانشگاه صنعتی شريف می باشد.
کنترل ارتعاشات سکوی پايه کششی تحت بارهای ديناميکی عنوان پایان نامه مقطع کارشناسی ارشد رشته مهندسی دریا دانشکده مهندسی مکانیک دانشگاه صنعتی شريف می باشد.
به گزارش مارین نیوز، این پایان نامه، کارشناسي ارشد ابراهيم ملايجردی دانشجوی مهندسی دریا با استاد راهنمایی دکتر محمدرضا تابشپور از دانشکده مهندسی مکانیک دانشگاه صنعتی شريف می باشد.
چکيده
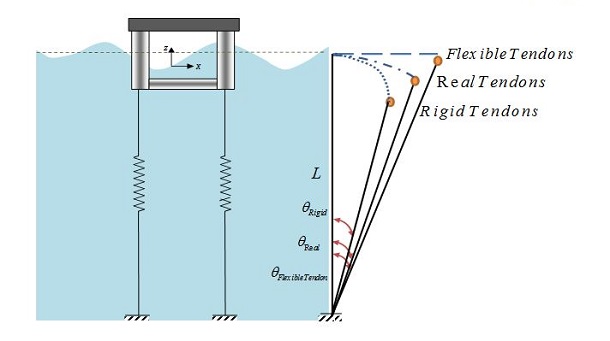
سکوهای پایه کششی جزو سکوهای تطبیقی میباشد که توسط تندونها به بستر دریا متصل میشوند. در این نوع سکوها نیروی شناوری از وزن بیشتر میباشد و پیشکشیدگی تندونها، بویانسی اضافی را متعادل میکند. این سکو شامل بدنه شناور، عرشه و سیستم مهار میباشد. بدنه شناور نقش نگهداری عرشه سکو را بر عهده دارد و یک سیستم پیچیده سکو را مهار میکند. سازههای دریایی بعلت اعمال بارهای محیطی مانند باد، امواج، جریانهای دریایی و زمین لرزه تحت ارتعاشات قرار دارند. کنترل این ارتعاشات از نظر رفتاری و خستگی بسیار مهم است.
در این پایاننامه به کنترل غیرفعال حرکات سکوی پایهکششی با مدلهای مختلف میراگر جرمی تنظیمشده پرداخته شده است. در این مطالعه ابتدا انواع سکوهای پایه کششی، انواع سیستمهای کنترل و پژوهشهای انجام شده در این زمینهها معرفی شده است.
در ادامه تحلیل امواج دریا در حوزه زمان و فرکانس انجام شده است همچنین تحلیل طیفی نیروی امواج در سازههای دریایی بررسی شده است.
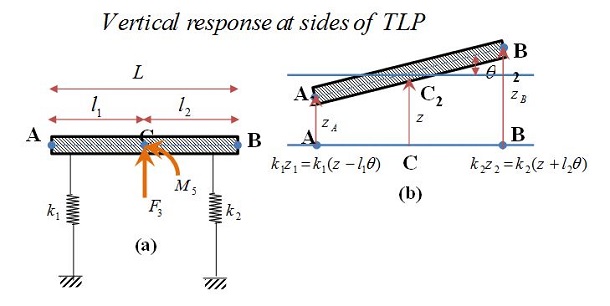
سپس معادلات حرکت سکوی پایه کششی در امواج منظم به روش المان مرزی استخراج شده است. نمودار های عملگر دامنه پاسخ حرکات سکوی پایه کششی بدست آمده است. بررسی تفسیری قله و قعر های نمودار های عملگر دامنه پاسخ حرکات انجام شده است. تحلیل کاربردی سکوی پایهکششی با عملگر دامنه پاسخ مطالعه شده است. همچنین سهم پیچ در کوپلینگ هیو با پیچ سکوی پایه کششی در نقاط کناری بررسی شده است.
در این فصل به بررسی تفسیری مولفههای هیو سکوی پایهکششی در کوپلینگ حرکات هیو با سرج پرداخته شده است.
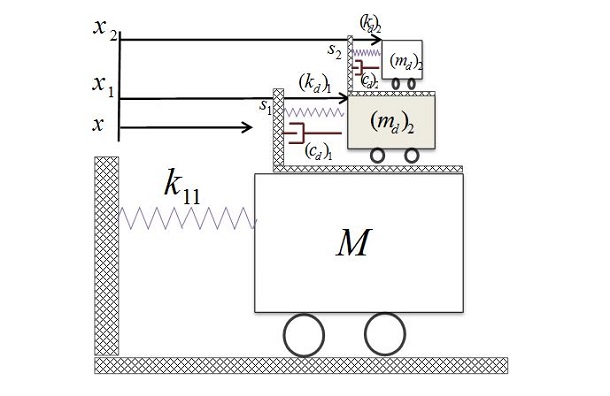
در انتها کنترل غیرفعال حرکت هیو بترتیب با یک میراگر جرمی تنظیمشده قائم در مرکز عرشه، میراگر جرمی تنظیم شده پاندولی با میرایی وبدون میرایی بررسی شده است. سپس کنترل غیرفعال همزمان حرکات هیو و پیچ با دو میراگر جرمی تنظیمشده قائم در گوشههای عرشه مورد مطالعه قرار گرفته است.
در نهایت کنترل غیرفعال حرکت سرج با یک یا دوبل میراگر جرمی تنظیمشده افقی در مرکز عرشه مورد بررسی قرار گرفته است.
کليد واژه: سکوی پایهکششی، تحلیل امواج، کوپلینگ حرکات، مولفههای حرکت هیو، تحلیل طیفی، عملگر دامنه پاسخ، کنترل غیرفعال، میراگر جرمی تنظیم شده.